中学项目:机器人游中国
2019-07-26 16:27:33

参赛对象:初一以上
竞赛类型:团队赛(2台机器人)
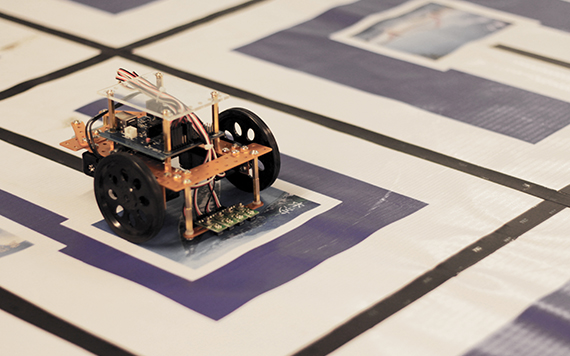
比赛任务:参赛机器人在规定时间内,从“OPEN 起始站”出发游历赛前抽签决定的12个景点,并最后返回起点。
比赛时间:180秒
竞赛说明:
项目要求机器人在规定时间内,游历尽量多的景点,获得尽量多的得分,并回到出发点,整个过程正如一个机器人在中国旅游,故名机器人游中国。 项目关键在于机器人的循线行驶能力、路径规划能力。
竞赛套件:ERCC E255-TZT

| 编程软件 | Keil C51 |
| 控制器 | c51教学板 |
| 控制电机 | 角度舵机 |
| 结构件 | 金属拼装件 |
| 传感器 |
数字编码器,红外距离探测器,Sensirion温湿度传感器,LCD液晶显示模块 ,8位数码管显示模块,8位数模转换器,一位数码管(阳极) |
| 组装模型 | 基于面包板的各式电路 |
| 电源 | 18650可充电锂电池 |
| 包装尺寸 | 31.6*23.4*10.2CM |
| 组合重量 | 1170g |
配套教材:单片机技术及应用
| 第1章 | 单片机最小系统电路好搭建 |
| 第2章 | 单片机并行I/O端口应用——机器人信息显示 |
| 第3章 | 定时器和中断系统——机器人速度测量与控制 |
| 第4章 | 单片机计时与键盘接口技术——机器人计时 |
| 第5章 | A/D、D/A转换接口与漫游机器人制作 |
| 第6章 | SPI接口与温湿度检测机器人的制作 |
| 第7章 | 综合比赛项目——机器人游中国高级竞赛 |
| 第8章 | 综合比赛项目——教育机器人灭火比赛 |

打开微信“扫一扫”,打开网页后点击屏幕右上角分享按钮
- 联系我们
- 地址:广东省东莞市松山湖新竹路4号新竹苑17B栋4层
- 电话:0769-23078825
- 邮箱:ercc@ercc.org.cn
- 友情链接
- 中国人工智能学会
- 松山湖国际机器人产业基地
- 中科乐活动中心
- 关注我们

- 蓝牙遥控下载

全童科教(东莞)有限公司 版权所有 粤ICP备17101334号-1